 |
清华大学智能与生物机械研究室 |
| Intelligent and Biomimetic Machinery Lab of Tsinghua |
| Research | Position:Direction |
| 康复 Rehabilitation |
|
本课题组开展面向运动功能损伤的患者/老年人的内干预及外辅助技术,以恢复运动功能及感觉能力的生机电融合技术及系统装备的前沿研究。 In order to improve motor and sensory abilities of patients with motor deficits, the elderly people, by the means of applying internal intervention or external assistance, the main task of this position is to study cutting-edge technologies of integration of human and mechatronic systems and develop advanced equipment |
| 用于减少功耗的并联柔性驱动下肢外骨骼 |
| A Parallel Elastic Actuator Driven Lower Limb Exoskeleton with low power consumption |
|
|
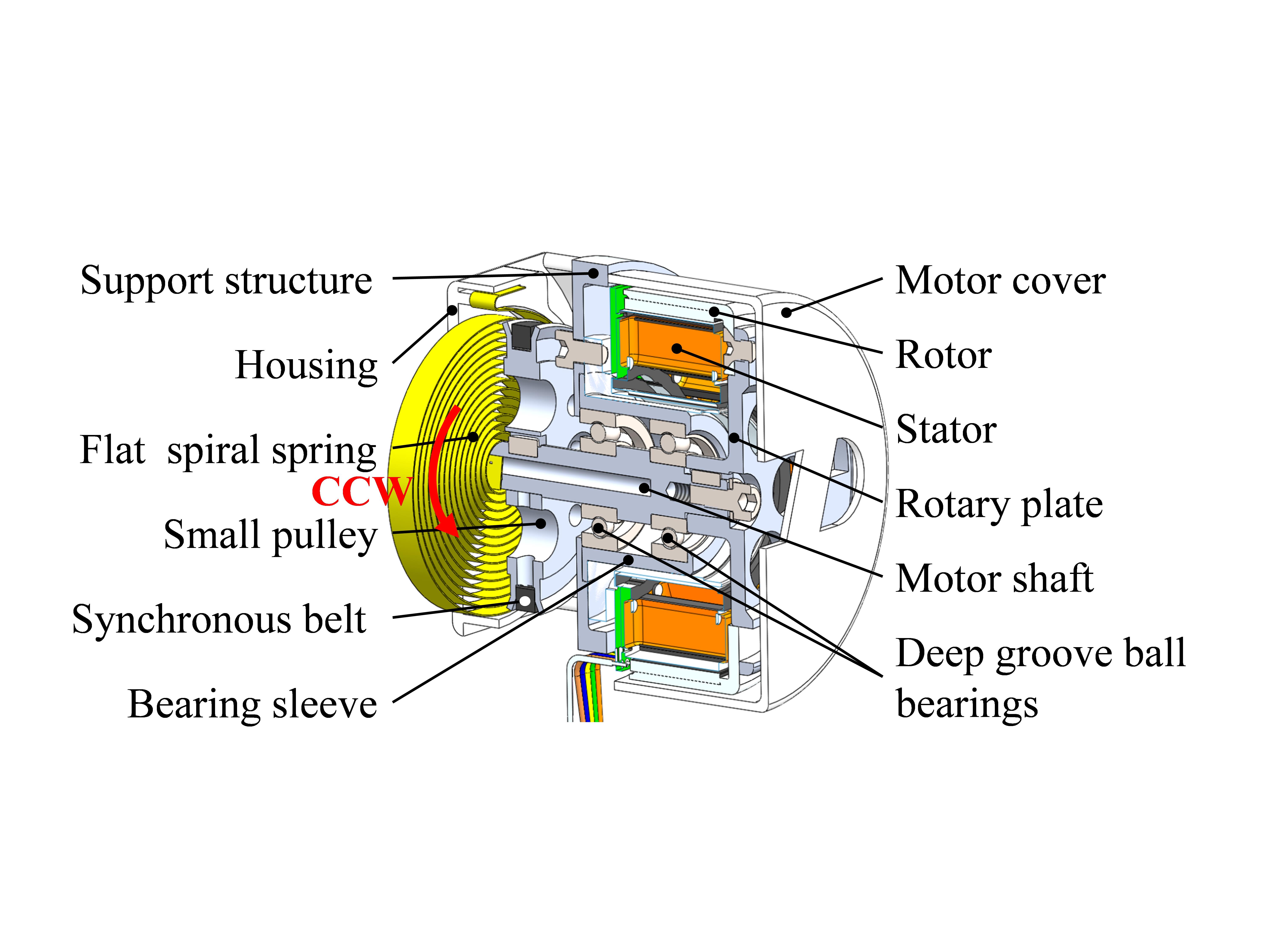
针对截瘫患者对行走的需求,本课题组开发了一套新型的低能量消耗的下肢外骨骼机器人,核心是并联柔性技术的理论研究、新型拓扑结构设计及仿真、实验验证。区别于传统并联柔性驱动器,本研究将柔性元件直接与电机轴并联并集成在电机的设计中,大大降低了对柔性元件的刚度和尺寸需求,使驱动器结构紧凑。临床实验发现,本样机可降低电机电能消耗高达80%-90%,故本研究创新地实现了在外骨骼助行时小弹簧降低高能耗的功能(相关论文专利请见https://www.researchgate.net/profile/Yinbo_Li)。 Our group has developed a novel lower limb exoskeleton with low power consumption for helping paraplegic patients regain locomotion abilities. We mainly contribute to the parallel elastic actuator (PEA) technologies including the theoretical study, the structure design with new topology and the simulated and experimental validation. Different from the traditional PEA, the parallel elasticity (PE) is directly placed parallel to the motor shaft and integrated to the design of the motor in the proposed PEA. This significantly reduces the stiffness and size requirement for the PE and makes the PEA compact. The experimental results show that the energy consumption of the motor can be reduced by 80%-90%. Therefore, we innovatively meet the purpose that a small spring is able to reduce much power consumption during walking assistance (To see the relevant articles, please open the link https://www.researchgate.net/profile/Yinbo_Li). |
| 脑机交互康复训练研究 |
| Brain-machine interaction (BMI) rehabilitation |
 |
|
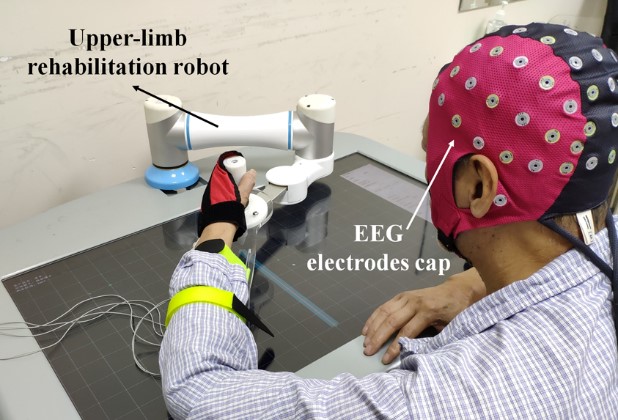
脑机交互康复训练将患者的运动意图与瘫痪肢体实际动作进行连接,本课题组构建运动控制系统闭环,针对构成运动感觉反馈各环节的表现形式及作用机理进行了深入探究。根据不同神经损伤对患者运动表达的影响,构建个性化、动态的运动感觉闭环,结合患者的康复需求,将机器人辅助脑控训练应用于临床实验,从训练前后患者运动功能评定、患者损伤脑区与运动意图表达脑区的相关关系以及脑区间功能连接强度的变化等分析入手,研究闭环训练的康复效果和作用机理,进而指导康复实践,促进康复机器人临床实用及推广的进程。 Brain-machine interaction (BMI) rehabilitation training aims to close the loop between the motor intention and actual movement. The research focuses on the explorations of the manifestations and mechanism of each part of sensorimotor closed loop. Based on the varied deficits of stroke patients, the individualized and dynamic sensorimotor loop is established. The individualized BMI rehabilitation robot has been used in clinical practice. The effect and mechanism of the individualized BMI training is evaluated with the motor function improvement, the evolutionary relationship between the injured brain areas and motor intention expression brain areas, and brain topological network. We aims to promote the clinical use of rehabilitation robots and provide stroke patients with large-scale and efficient rehabilitation training. (Jia et al., 2020) |
| 上肢康复机器人 |
| Upper limb rehabilitation robot |
 |
|
据统计,我国每年新发脑卒中约250万例,幸存患者超过1000万,脑卒中已成为我国致残率最高的疾病。近年来,我国老龄化加剧,康复医疗资源紧缺成为亟待解决的社会问题。1998年以来,本实验室就致力于智能康复设备与辅具的研究工作,我们根据神经可塑性理论以及机器人人机交互技术研发的上肢康复机器人,可以辅助由神经损伤造成的上肢运动功能障碍的患者进行康复训练。
上肢康复机器人可以根据不同患者运动功能状态的个体差异性为患者提供最适宜的康复训练模式,包括被动模式、助动模式、主动模式和脑控模式等康复训练模式,能够满足神经损伤患者全周期康复训练需求。此款机器人在患者训练同时可以通过传感器对患者训练表现及上肢运动功能进行定量评估,为康复医师全面评估患者状态、制定个性化训练处方提供辅助决策。 According to statistics, there are about 2.5 million new stroke cases in China every year, with more than 10 million survivors. Stroke has become the disease with the highest disability rate in China. In recent years, with the aggravation of aging in China, the shortage of rehabilitation medical resources has become a social problem to be solved urgently. Since 1998, the Intelligence and Biomechanical Laboratory of Tsinghua University has been committed to the research of intelligent rehabilitation equipment and assistive devices. The upper limb rehabilitation robot developed by the team based on the theory of neuroplasticity and robotic human-computer interaction technology can assist the rehabilitation training of patients with upper limb motor dysfunction caused by nerve injury.
The upper limb rehabilitation robot can provide the most appropriate rehabilitation training mode for patients according to the individual differences of different patients' motor functions, including passive mode, assisted mode, active mode and brain control mode, etc., which can meet the needs of full cycle rehabilitation training for patients with nerve injury. This robot can simultaneously conduct quantitative evaluation of the patient's training performance and upper limb motor function through sensors during patient training, and provide auxiliary decision-making for rehabilitation physicians to comprehensively evaluate the patient's status and formulate personalized training prescriptions. |

